Автоматизація виробництва на елеваторах
Система дистанційного автоматизованого управління елеватором ТОВ ІННОВІННПРОМ (СДАУ-Е) призначена для автоматизації процесів зберігання, переміщення, завантаження / розвантаження, просушування зернопродуктів на елеваторах. Система забезпечує автоматичний контроль роботи обладнання, облік необхідних технологічних затримок, дотримання технологічних алгоритмів.
Застосування СДАУ-Е дозволяє значно підвищити продуктивність роботи елеватора і знизити економічні втрати за рахунок виключення помилок персоналу при роботі з обладнанням, зниження енергоспоживання в результаті автоматичного вибору найменш енергоємних маршрутів переміщення зернопродуктів і скорочення до мінімуму технологічних затримок, скорочення часу реакції системи в разі виникнення аварійної ситуації.
СДАУ-Е не вимагає високої кваліфікації персоналу і строгих знань особливостей роботи кожної одиниці обладнання. Оператору досить вказати початковий і кінцевий пункти переміщення зерна, зернопродуктів СДАУ-Е запропонує кілька найбільш оптимальних маршрутів, починаючи з найменш енергоємного. Тому оператором СДАУ-Е може бути особа з середньою або з середньо-спеціальною освітою, що володіє мінімальними знаннями технології елеватора і базовими навичками по роботі з ПК.
В процесі роботи СДАУ-Е не вимагає безперервного присутності персоналу за екранами моніторів. Оператору досить вибрати маршрут переміщення зернопродуктів і дати команду на його запуск / зупинку, інші дії СДАУ-Е виконає автоматично. У разі виникнення аварійної ситуації буде поданий сигнал тривоги. У разі поломки обладнання система запропонує новий маршрут.
Крім того СДАУ-Е здійснює автоматичний контроль переміщення культур зернопродуктів не допускаючи їх помилкового перемішування.
СДАУ-Е забезпечує облік напрацювання кожної одиниці обладнання.
У СДАУ-Е може бути інтегрована система вимірювання температури.
Для підтримки експлуатації впроваджених СДАУ-Е реалізована система сервісної підтримки ІННОВІННПРОМ, яка надає можливість оперативного дистанційного вирішення питань модернізації технологічних схем, оновлення всіх рівнів, подолання аварійних ситуацій без виїзду представників розробника на об'єкт.
Структура СДАУ-Е 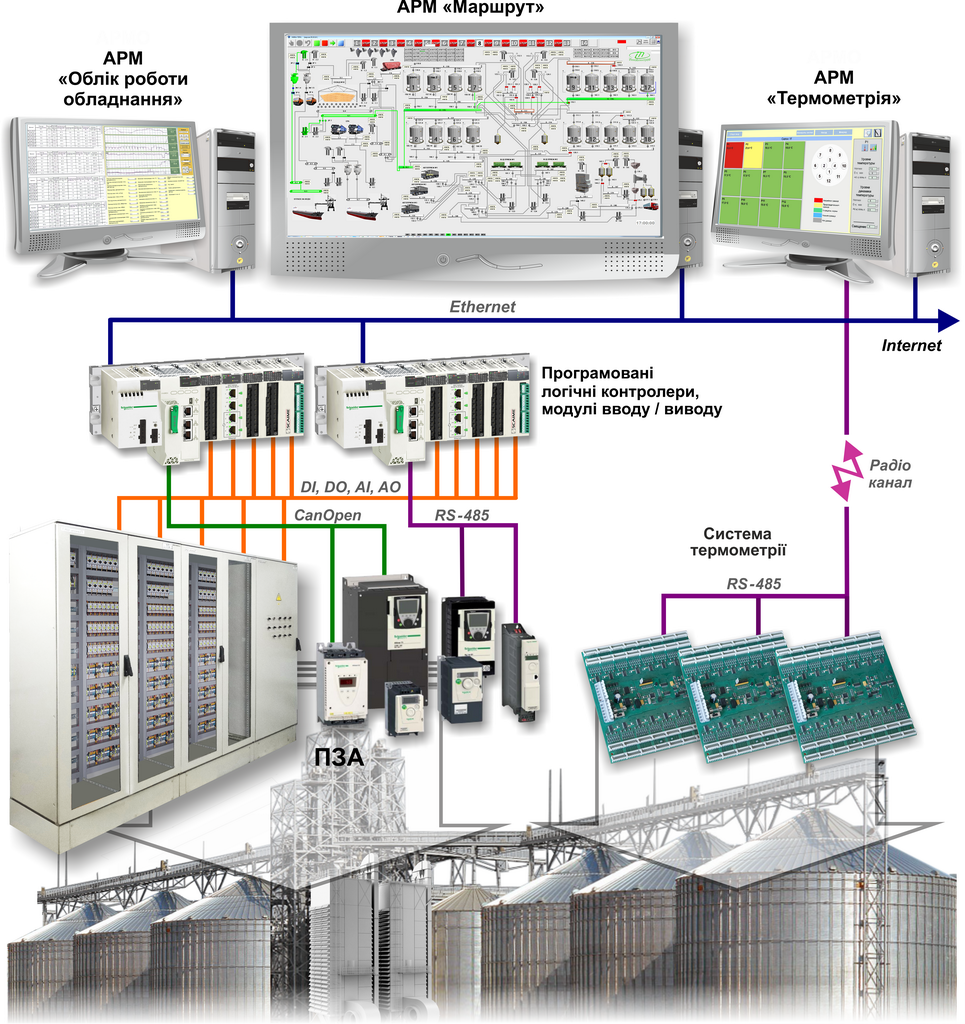
При побудові систем дистанційного автоматизованого управління елеватором враховуються такі основні, вироблені на основі досвіду багаторічної успішної реалізації, принципи:
- висока надійність системи;
- модульність системи;
- повторюваність при реалізації;
- найкоротші терміни реалізації;
- простота налагодження та обслуговування.
Програмовані логічні контролери (ПЛК) виконують функції управління обладнанням, контролю його стану і обробки аварійних ситуацій.
Програмне забезпечення ПЛК (ПЗ ПЛК) використовує типові алгоритмічні модулі (функціональні блоки) для основних типів виконавчих пристроїв і характерних завдань управління. Тому, при реалізації об'єкта автоматизації, завдання програміста зводиться до адаптації програмного забезпечення ПЛК до конкретного устаткування об'єкта шляхом настройки вже наявних функціональних блоків.
При побудові СДАУ-Е передбачається можливість використання до 32 ПЛК одночасно. Дана архітектура має ряд переваг в порівнянні з класичною однопроцесорною системою:
- вище надійність системи за рахунок розподілу структури (територіально по РП, функціонально по завантаженню / вивантаженню, типу зберігання та ін.);
- практично відсутнє обмеження по кількості вхідних / вихідних каналів;
- нижче вартість системи за рахунок зниження вартості ПЛК і зниження трудовитрат на його програмування (як правило, застосовується не перенасичений функціонально, простий в програмуванні ПЛК з мінімально достатніми технічними параметрами).
До пускозахисної апаратури (ПЗА) відносяться частотні приводи, пристрої плавного пуску електродвигунів, рубильники, автоматичні вимикачі, магнітні пускачі, реле управління та захисту, запобіжники, кнопки управління і кнопкові станції, кулачкові і пакетні вимикачі і перемикачі, сигнальні лампи, пр. ПЗА може встановлюватися як окремо, так і в комплектних станціях, щитах і пультах управління як відокремленими машинами і агрегатами, так і цілими технологічними лініями.
Для підключення обладнання застосовуються типові, виконані відповідно до вимог стандартів, схеми підключення та управління.
Автоматизоване робоче місце «Маршрут»
Автоматизоване робоче місце «Маршрут» (АРМО) обладнується на базі сучасного високопродуктивного персонального комп’ютера. В якості програмного забезпечення застосовується унікальна система автоматизованого проектування «Маршрут» розробки ТОВ «ІННОВІННПРОМ» (САПР «Маршрут»), яка є потужним програмним продуктом, спеціалізованим для побудови автоматизованих систем управління технологічними процесами (АСУ ТП) елеваторів і зерносховищ.
Головна «родзинка» САПР «Маршрут» - якісне безвідмовне безпомилкове виконання завдань маршрутизації переміщення зернопродуктів. Наприклад, на елеваторі з 200 одиницями різного обладнання можлива реалізація понад тисячу маршрутів. При цьому для переміщення Зернопродукту оператору досить лише вказати початок і кінець маршруту. Завдяки цьому, оператором може бути персонал із середнім рівнем освіти, тому що САПР «Маршрут» автоматично запропонує, включить і проконтролює найбільш оптимальний маршрут з урахуванням стану обладнання, що вже працюють маршрутів і переміщуються культур, щоб уникнути їх перемішування.
Завдання вибору з сотень можливих маршрутів оптимального за кількістю обладнання і споживання електроенергії доступна для вирішення далеко не кожній SCADA системою, особливо, якщо SCADA система є універсальною з величезною кількістю непотрібних для автоматизації зернокомплекси функцій, які тим не менш віднімають ресурси. Тому, як правило, СДАУ, які виконані на базі таких SCADA, практично не реалізовують завдання автоматичної маршрутизації і вимагають більш високого рівня підготовки операторів, що не завжди можливо в сільській місцевості. Оператор змушений вибирати необхідний маршрут тільки з обмеженого списку штатних маршрутів, або включати маршрут вручну - пристрій за пристроєм, що неминуче тягне до виникнення помилок і, відповідно, виникнення виробничих і економічних втрат пов'язаних з людським фактором. Крім того, реалізація СДАУ на даних SCADA системах вимагає значно більших людських ресурсів і часу для їх реалізації – як мінімум залучення протягом двох місяців двох висококласних програмістів для роботи безпосередньо в середовищі SCADA (конфігурації проекту і написання програмних модулів пристроїв) і програміста для роботи з ПЛК. При цьому замовник отримує закритий для нього і недоступний для змін програмний продукт з меншою кількістю необхідних для зернокомплекси можливостей, що вимагає висококваліфікованого персоналу для забезпечення його роботи і обслуговування.
На противагу вище викладеного, САПР «Маршрут» є відкритим, доступним для швидкого редагування протестованим на десятках елеваторів програмним продуктом який забезпечує повним набором необхідних для управління елеватором функцій.
Склад САПР «Маршрут»:
- ПЗ «Управління елеватором»;
- ПЗ «Редактор зображень і властивостей».
Обидва програмні продукти є повністю налагодженим і випробуваним багаторічним практичним досвідом на десятках підприємств АПК програмним продуктом. Обидва ПЗ можуть одночасно функціонувати на одному ПК і дозволяють виробляти зміни в технологічній схемі елеватора БЕЗ ЗУПИНКИ обладнання СИЛАМИ ФАХІВЦІВ ЕЛЕВАТОРА.
Програмне забезпечення "Управління елеватором"
ПЗ "Управління елеватором" виконує наступні функції:
- забезпечення заданої логіки функціонування технологічного комплексу;
- автоматичний пуск і зупинка технологічного обладнання;
- вибір і запуск оптимального за кількістю обладнання і споживаної потужності технологічного маршруту переміщення зерна зі списку можливих;
- блокування механізмів і маршрутів цілком;
- одночасний запуск декількох непересічних маршрутів;
- об'єднання декількох маршрутів;
- поділ маршрутів;
- запуск складних складових маршрутів;
- оперативна зміна діючих маршрутів:
- контроль роботи технологічного обладнання і ведення протоколів зупинок і аварійних ситуацій;
- відображення стану обладнання, а також фаз технологічних процесів.
ПЗ забезпечує можливість введення оператором маршруту переміщення зерна, контроль правильності маршруту і автоматизований запуск / зупинку маршруту з необхідними блокуваннями, інформаційне обслуговування оператора по роботі технологічного обладнання та аспіраційних мереж.
Програма включає транспортне обладнання за маршрутами, що обирається оператором. При цьому оператор вносить в систему обладнання початку і кінця маршруту, а при необхідності, проміжне обладнання. Включення механізмів в маршрут виконується в зустрічному напрямку потоку зерна, а вимикання в попутному. Подача зерна в маршрут можлива при працюючому транспортному обладнанні.
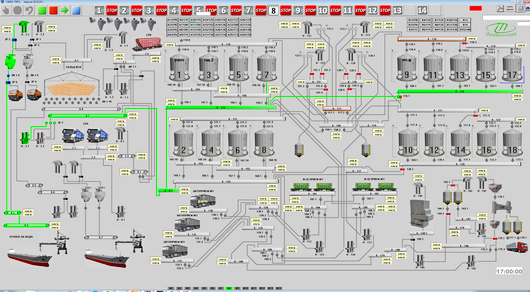
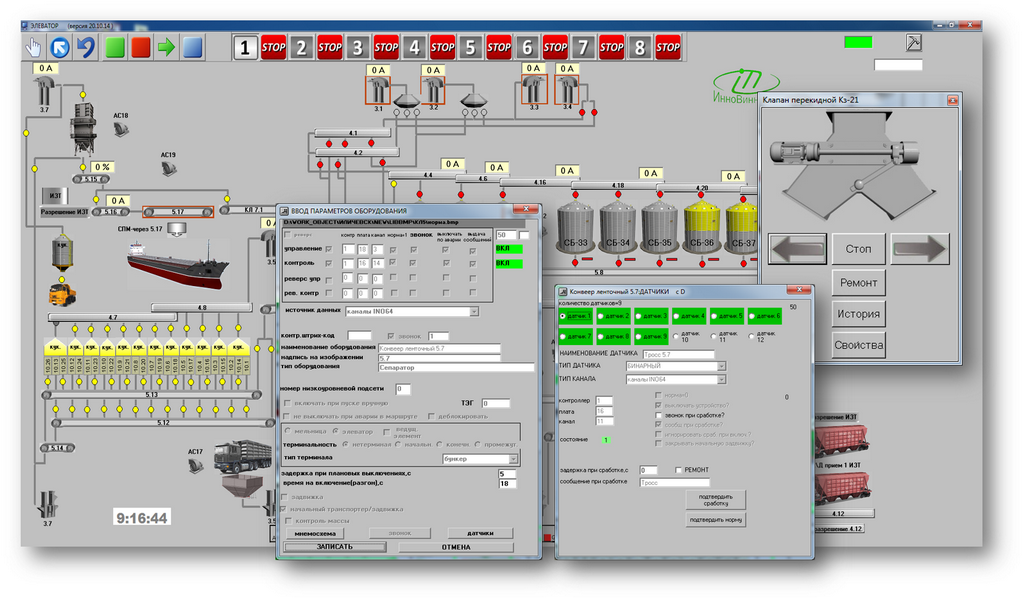
Приклад інтерфейсу ПЗ «Управління елеватором»:
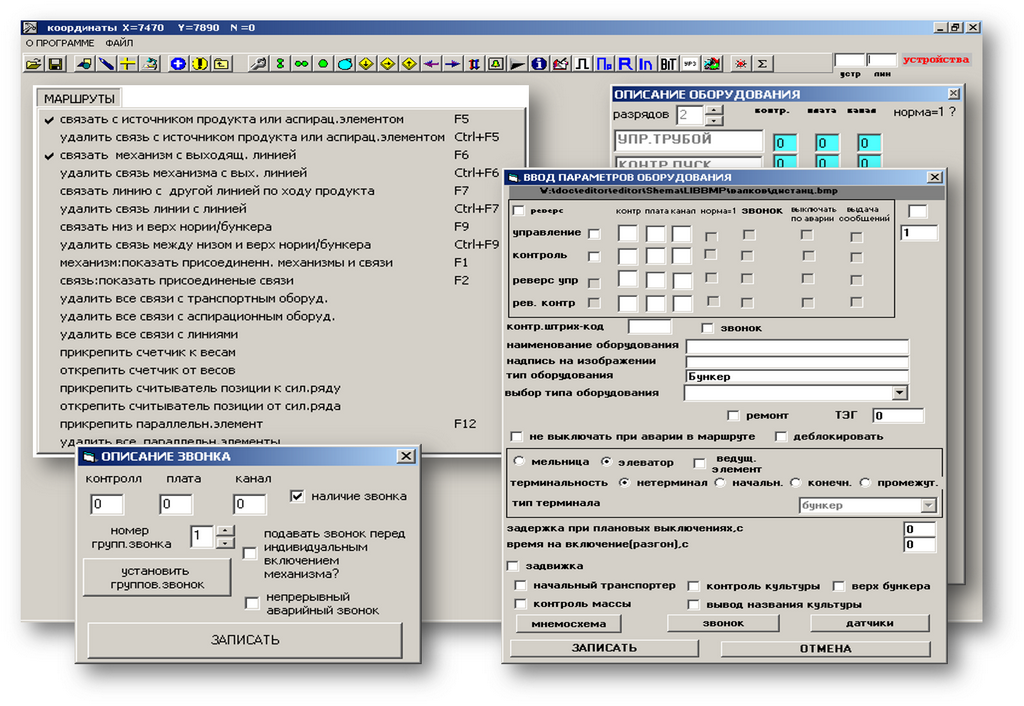
Програмне забезпечення "Редактор зображень і властивостей"
ПЗ "Редактор зображень і властивостей" може поставлятися (за умовами договору з Замовником) спільно з ПЗ "Управління елеватором". ПЗ "Редактор зображень і властивостей" призначено для створення і редагування загальної схеми елеватора, редагування параметрів пристроїв.
ПЗ "Редактор зображень і властивостей" розробки ТОВ «ІННОВІННПРОМ» є єдиною на ринку повноцінною системою автоматизованого проектування (САПР) високого рівня для розробки СДАУ елеваторів.
ПЗ "Редактор зображень і властивостей" виконує функції створення та редагування загальної схеми елеватора і параметрів обладнання. Кількість і тип контролерів, модулів вводу / виводу, призначення входів / виходів задається з контекстних вікон управління обладнанням і може бути змінено персоналом елеватора відповідно до прав доступу.
Основні функції редактора:
- створення технологічної схеми елеватора;
- введення властивостей обладнання;
- редагування загальної схеми елеватора;
- редагування властивостей обладнання.
Створення і зміна технологічної схеми елеватора проводиться шляхом вибору з бібліотеки програми піктограм обладнання та присвоєння йому властивостей, створення зв'язків між обладнанням. Виконання даних дій не вимагає від персоналу знань мов програмування, тільки знань технології елеватора і базових функцій редактора.
 Глянець
Глянець